|
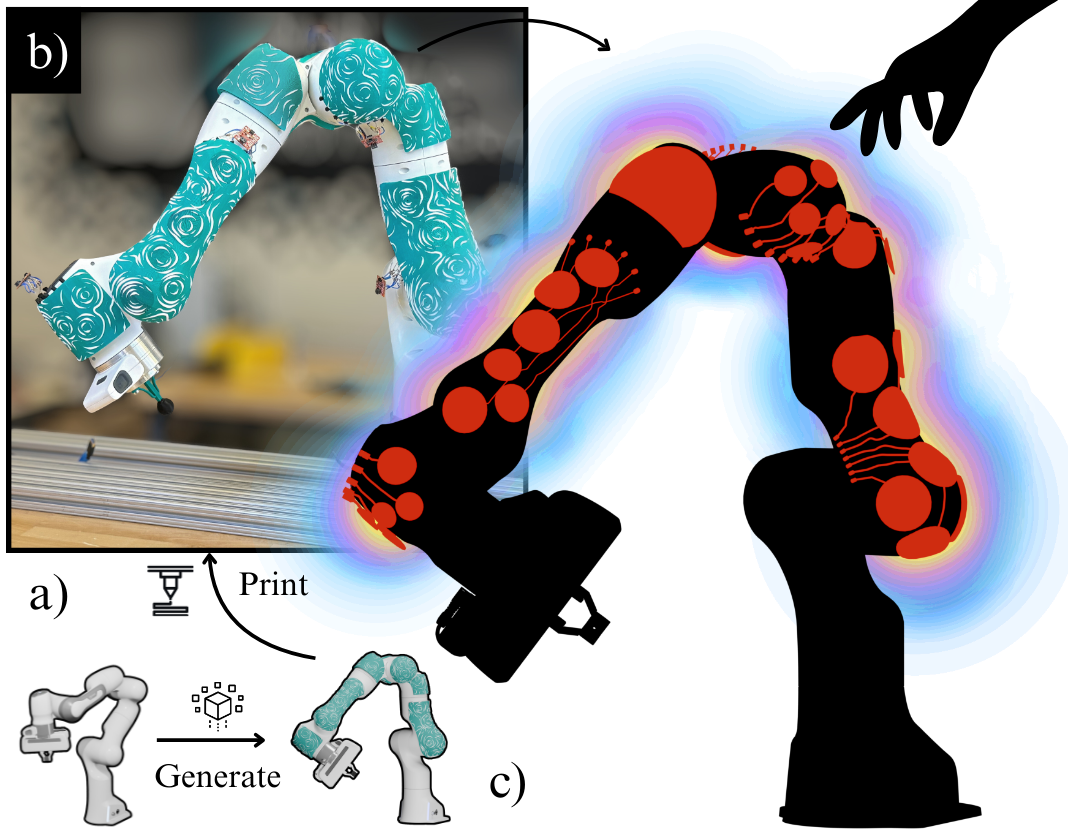
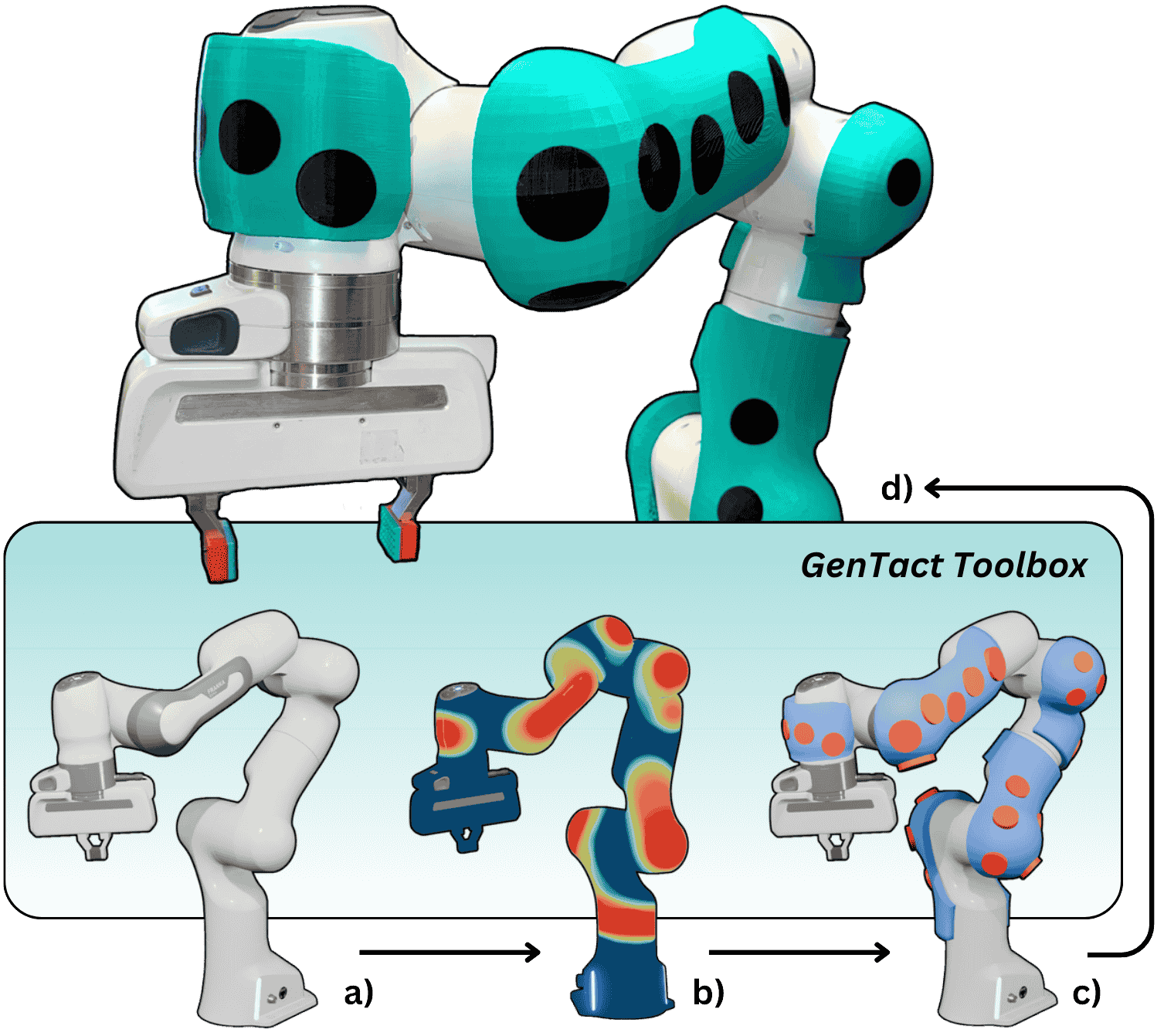
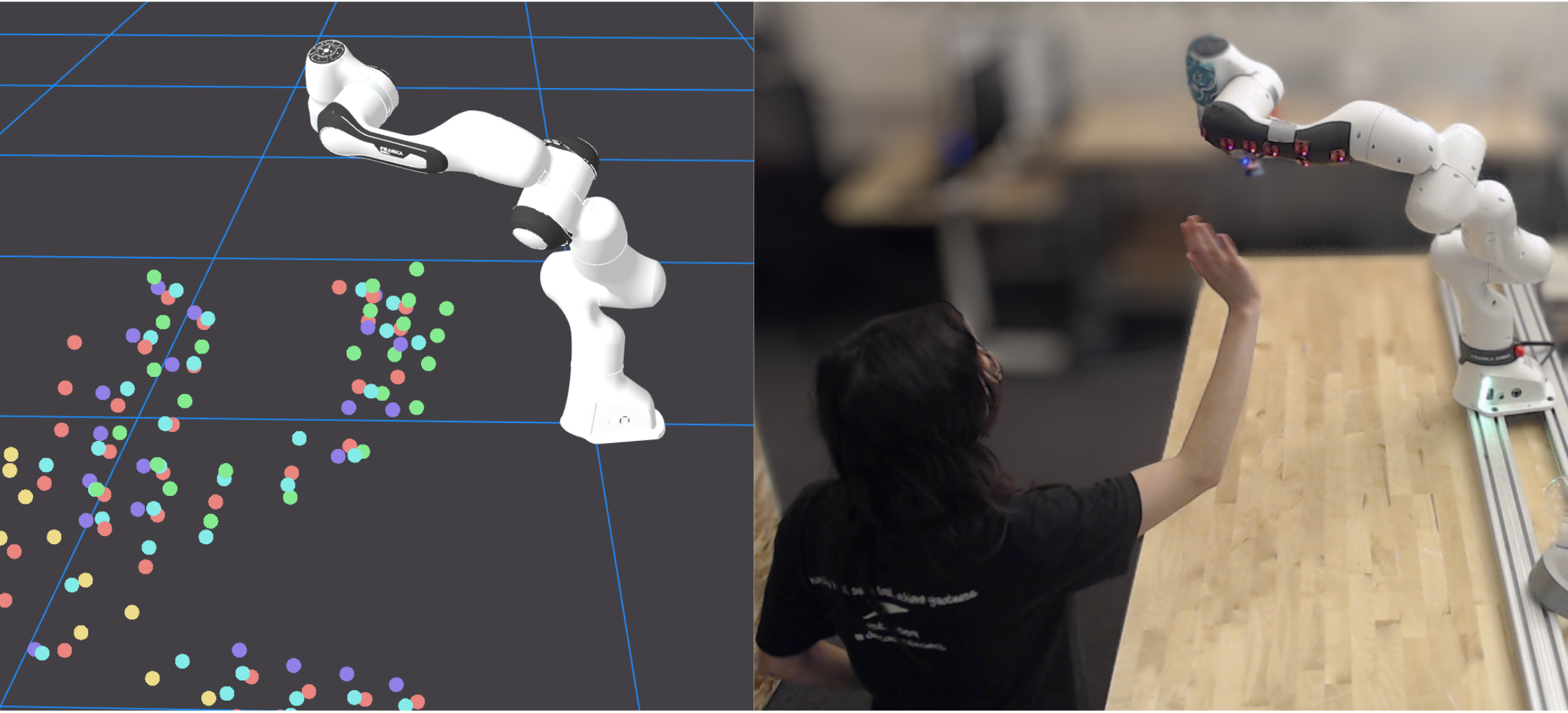
Carson Kohlbrenner I am a PhD student with the Human Interaction & Robotics Group at the University of Colorado Boulder advised by Alessandro Roncone. My research interests lie in whole-body perception and learning for collaborative robotics. Specifically, my research is focused on establishing a body schema in robots through tactile sensing and artificial peri-personal space. I am currently the primary maintainer of the GenTact Toolbox, a computational design pipeline for generating whole-body tactile skins that are fully 3D printable.
When I'm not immersed in research, you can find me enjoying a round of golf, producing music, or enjoying the outdoors. I am always interested in new opportunities and collaborations! |

|
Impacts |
|
|




Publications |
Conference Papers |
| 2026 |
|
Design, Mapping, and Contact Anticipation with 3D-printed Whole-Body Tactile and Proximity Sensors
IEEE International Conference on Robotics and Automation (ICRA), 2026 |
| 2025 |
|
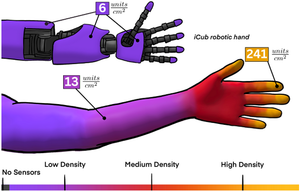
GenTact Toolbox: A Computational Design Pipeline to Procedurally Generate Context-Driven 3D Printed Whole-Body Tactile Skins
IEEE International Conference on Robotics and Automation (ICRA), 2025 |
Workshop Papers |
| 2025 |
|
Form-Fitting, Large-Area Sensor Mounting for Obstacle Detection
Humanoids Workshop on Advances in Contact-Rich Robotics: Rich Tactile-Based Physical Interaction [ConRich], 2025 |
| 2024 |
|
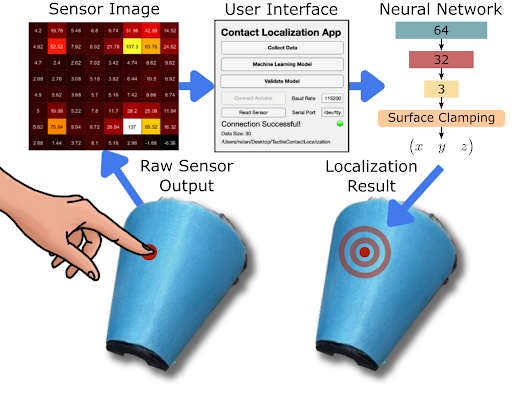
A Machine Learning Approach to Contact Localization in Variable Density Three-Dimensional Tactile Artificial Skin
NeurIPS - Workshop on Touch Processing, 2024 |
Preprints |
| 2024 |
|
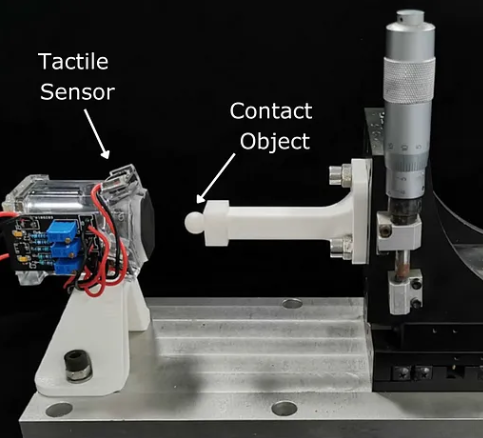
A Sensor Position Localization Method for Flexible, Non-uniform Capacitive Tactile Sensor Arrays
arXiv Preprint, 2024 |
Technical Reports |
| 2025 |
|
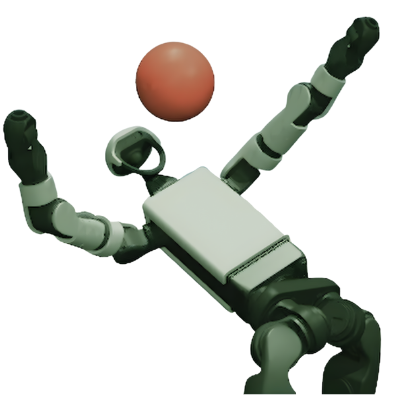
Whole-Body Dynamic Obstacle Avoidance with Humanoid Skin
Deep Reinforcement Learning Final Project, 2025 |
|
|
Converting the EuRoC MAV Dataset to MCAP and visualizing SLAM using Foxglove
Foxglove Tutorial, 2025 |
|
| 2024 |
|
Training CLIP to Recognize Objects with Tactile Sensors
Transformer Based Robotic AI, 2024 |
|
Self-Landing Rocket using Deep Reinforcement Learning
Decision Making Under Uncertainty Final Project, 2024 |
|

|
Autonomous Localization for GPS-denied Aerial Tracking and Reconnaissance (ALLIGATR)
Senior Capstone Project, 2024 |
|
| 2023 |

|
Linear Temporal Logic Planning for Quadcopter Reconnaissance in Densely Populated Environments
Motion Planning Final Project, 2023 |
|
Site template built by Jon Barron. |